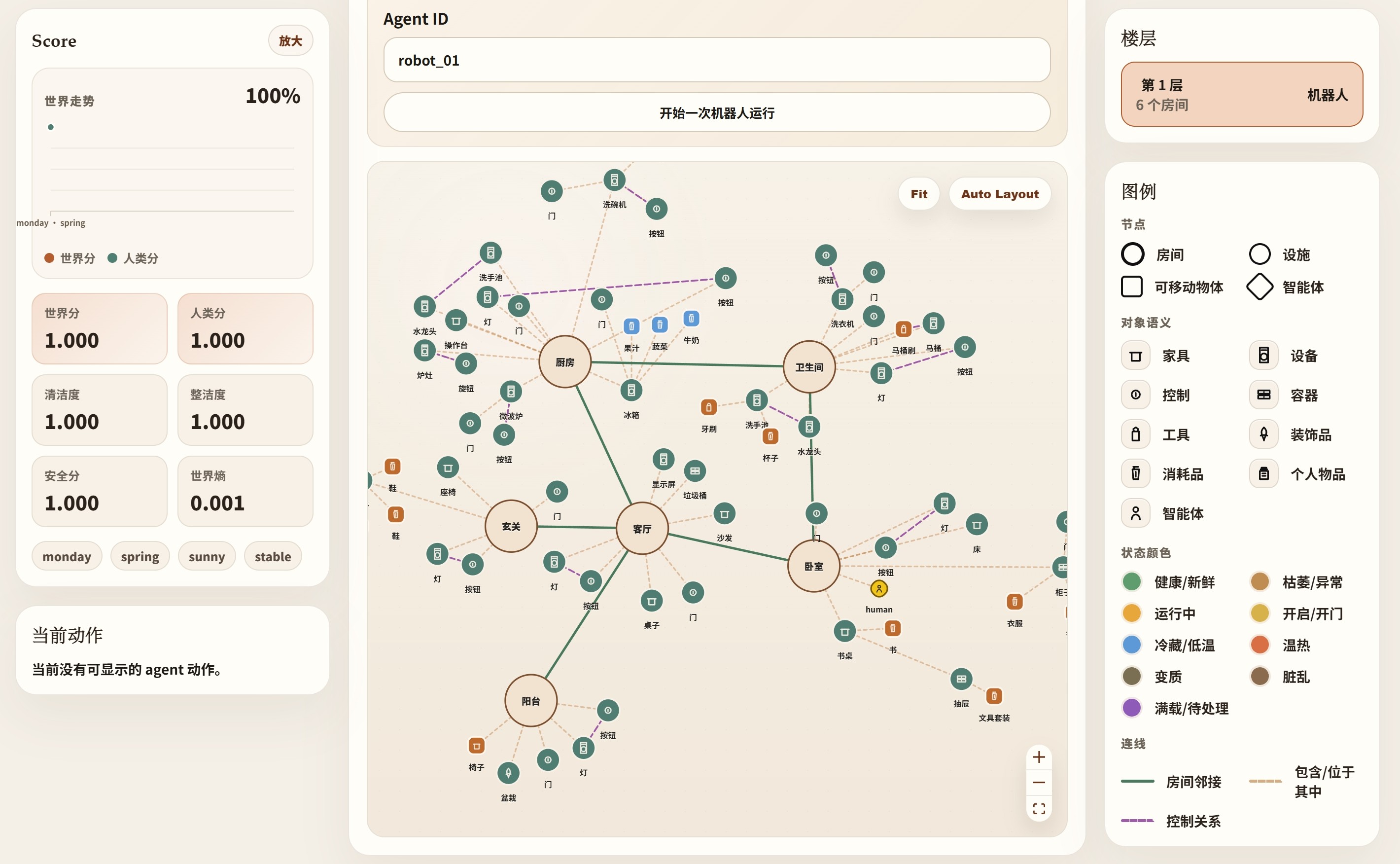
层次化场景图规划
用结构化空间关系承接长期任务,减少状态机和行为树的人工维护。
驭灵科技创新性提出场景图语言模型,面向非结构化场景,构建从语义感知、任务规划、操作策略在全尺寸本体的执行系统。机器人不局限在固定流程,而是在陌生环境中根据人类语言指令,完成对未知任务的移动与操作子任务拆解。
Robotic Prefrontal Cortex
以语义决策引擎为上层执行中枢,联动感知、记忆、世界模型与底层控制,将长序列任务规划、技能库编排和现场部署收束在同一闭环内。
用结构化空间关系承接长期任务,减少状态机和行为树的人工维护。
DVS 将规划、感知和部署打通,在仿真与真机之间形成持续迭代。
围绕抓取、搬运、投递、避障与调度形成可复用技能库。
Full-Stack Intelligence
目标设定、长远规划、逻辑推理和复杂决策,定义机器人在物理世界的上层执行。
VLM、三维重建、轨迹预测与场景语义理解,让机器人理解货物、货架与通道。
VLA、模仿学习、强化学习结合 MPC、PID、ROS,完成稳定移动与精细操作。
仿真数据并行训练与真机反馈持续回流,提升复杂堆叠场景的泛化能力。

Universal Sorting Robot
全向移动底盘、双臂操作系统、双目视觉、多线激光雷达与本地模型部署,让机器人覆盖快递柜、药柜、货柜等多高度作业,并在狭窄过道中保持灵活调度。
Careers
我们正在寻找能把算法、机械、系统、电子和数据真正转化为产品的人,在现场解决难题。